„Fedezd fel a múltat, hogy megértsd a jelent és alakíthasd a jövőt!”– a mottója annak a többrészes a BBC-n futó dokumentumfilm-sorozatnak, amely a történelmi Olaszország építészeti műremekeit kutatja fel és tárja elénk azok – hétköznapi szemszögből láthatatlan – titkait a 3D pontfelhő technológia segítségével.
A 2017 januárjában leadott részek Nápoly, Velence és Firenze kétezer éves épületegyütteseit, csatornáit, városképeit mutatják be korszerű mérési és megjelenítési eszközeinket felhasználva, amelyekkel mind közelebb hozzák a reneszánsz valóságot a szemlélőhöz.
Tekintsd meg az alábbi 360 fokos panorámavideót, fordulj körbe a kurzor segítségével a virtuális kamera körül szabadon:
A ScanLAB projektek méréseit ezúttal Alexander Armstrong műsorvezető és Dr. Michael Scott történész elemzik 3D pontfelhő alapú modelleken, egy digitális utazásra invitálva homlokzatokon, falakon, alagutakon és vízfelületeken át. A projektek további érdekessége, hogy több gyártó lézerszkenneres mérőeszközeit egyidejűleg, egymással összhangban használták; így jelen beszámolónk célja sem az, hogy minőségbeli különbséget tegyen a különböző termékek és az azokból származó adatok minősége között; sokkal inkább az, hogy a már sokszor említett 3D pontfelhő erejét, használhatóságát és elterjedését bemutassa.

A rövidfilmekben látható történelmi alagutak, vájatok az ókori római vízvezeték-hálózat maradványai, amelyek még napjainkban is nagy hatással vannak a városok közmű- és infrastrukturális hálózatainak kialakítására, mi több: számos üzemelő kapcsolódási pontjuk van. Nápoly földalatti folyosóinak felmérése óriási kihívást jelentett a földmérők számára, azonban a sötét vájatokon, katakombákon és kamrákon való keresztülhaladást követően a fenséges Vezúv alatt elterülő város fényei várták mérnökeinket.
A bányamérésből és földmérésből is jól ismert hagyományos technikák segítségével hosszadalmas, hónapokig tartó munkafolyamat lehet egy hasonló felmérés elvégzése. Ugyanakkor a statikus lézerszkennerek és mobiltérképező-rendszerek hatékony adatgyűjtési eljárásait felhasználva a terepi mérés órákra, napokra redukálódhat, ahogyan történt ez példánkban is. Ahol számos eszköz már nem tudott az elvárásoknak megfelelni a szűkös hely miatt, ott a Leica Pegasus BackPack vette át a főszerepet. Ez a fajta mobiltérképező-rendszer a legalkalmazkodóbb hordozóra – az emberi testre – felszerelve könnyedén jut keresztül az említett vállszélességű nyílásokon is, hogy térinformációs adatokat gyűjtsön.

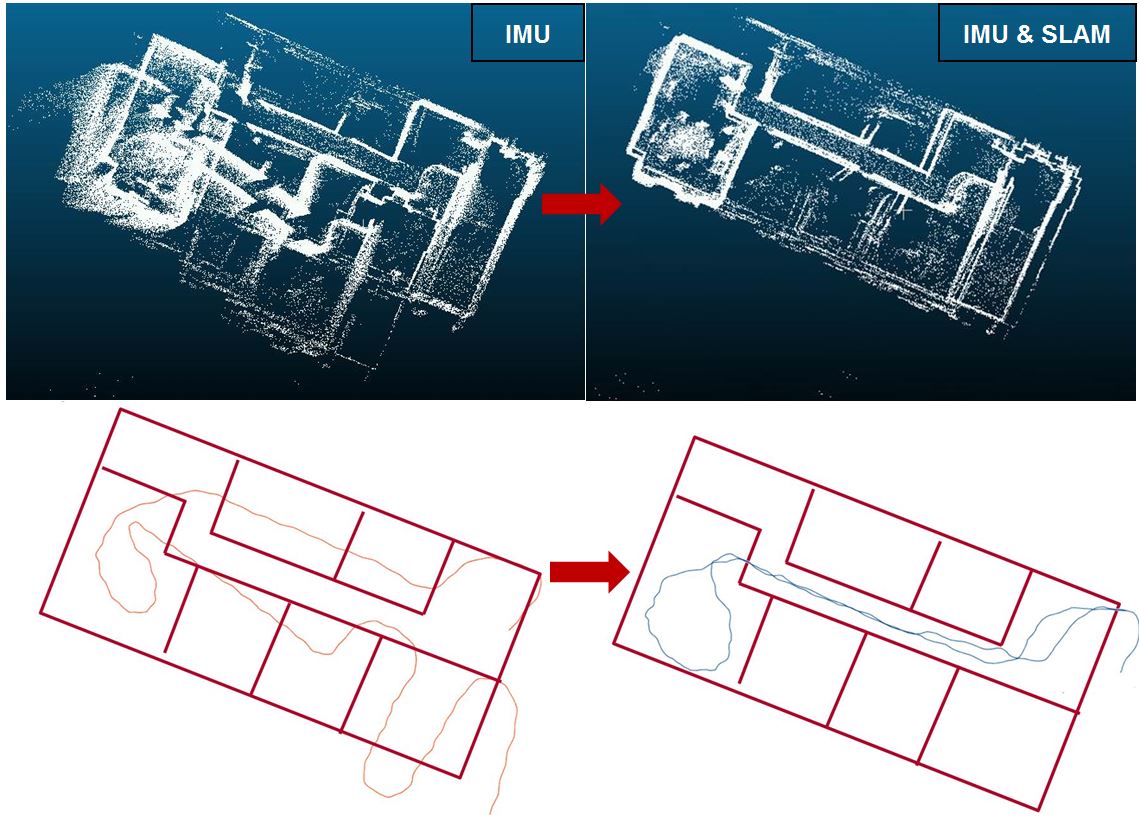
Az ultrakönnyű, kompakt és flexibilis karbonváznak köszönhetően kiváló ergonomikus tulajdonságokkal rendelkezik. Kettő darab LiDAR szkenner, öt darab HDR kamera és LED fényforrások segítségével valós színárnyalatú regisztrált pontfelhőt állít elő. A profilozó szkennerek egyenként 600.000 pont bemérésére alkalmasak. Egy-egy ilyen pontot három darab térbeli koordináta, egy a lézeres távolságmérést jellemző intenzitásérték és a három színkomponens (R,G,B) jellemez. A beépített GNSS vevő és az inerciális mérőegység (IMU-200 Hz) mellett a trajektória (azaz mérési útvonal, vagy nyomvonal) meghatározásában az ún. SLAM algoritmus is nagy szerepet kap, ezzel lehetővé téve a pontos és megbízható beltéri méréseket, amelyeknél nyilvánvalóan nincs GNSS jelünk. A rendszer abszolút mérési pontosságát alapvetően ez a három eljárás határozza meg. A mérés kezdete minden esetben egy kültéri, arra alkalmas műholdas lefedettséggel rendelkező helyen történik statikus, majd dinamikus inicializálással. Ez a néhány percig tartó művelet ahhoz szükséges, hogy a fedélzeti számítógép összehangolja a GNSS vevő és az IMU működését. Ideális esetben magán a mérési nyomvonalon is vételezünk GNSS jeleket, amelyek által fix pozíciókhoz igazodik a mindig drifttel (nyomvonal elcsavarodása) terhelt inerciális egység mért útvonala. Mivel ideális eset sokszor csak a tankönyvekben létezik, ezért kültéri statikus inicializálással fejezzük be a mérést. Felvetődik a kérdés természetesen, hogy mit tehetünk az abszolút pontosság javítása érdekében a példánkban említett hasonló, akár többszáz méter hosszú földalatti járatrendszerek esetén, ahol nincs lehetőségünk műholdas jeleket fogni. Nos, erre a megoldást a harmadik navigációs technika nyújtja.

SLAM: Simultaneous Localization and Mapping, azaz egyidejű pozíció-meghatározás és térképezés. Már az elnevezés is meghökkentő: tyúk és tojás paradoxonnak tűnik, igaz? Korábbi ismereteinkre hagyatkozva mondhatjuk, hogy térképezni úgy szokás, hogy valamilyen ismert pozícióból távolság- és iránymérésekkel meghatározzuk környezetünk bizonyos tereptárgyainak pozícióit. Vagy éppen fordítva: ismeretlen pozíciónkat ismert koordinátájú tereptárgyakra végzett távolság- és iránymérésekből származtatjuk. Akkor hogyan működhet mindez együtt, ha ebben a zárt rendszerben tényleg minden ismeretlen? A megoldást a rövid idő alatt keletkezett óriási adatmennyiség és számítástechnikai teljesítmény jelenti. Rövid távolságokon ugyanis az inerciális mérőegység nagyon megbízható: 200Hz-es sebességgel határozza meg relatív pozíciónkat a gyorsulás- és dőlésmérők segítségével, vagyis átlagos gyalogos sebességgel (5km/h = 1.39 m/s) haladva 1m-en körülbelül 144 mérést végez, azaz nyomvonalunk szinte minden hetedik milliméterén lesz az IMU-ból származó pozíciónk. A folyamatos szkennelésnek köszönhetően ezeken a pozíciókon keletkezett pontfelhőadatok – néhány méteres szakaszokat tekintve – szinte magának a lézerszkennernek a mérési megbízhatóságával és pontosságával fognak rendelkezni. Leegyszerűsítve, néhány méteres megbízható pontfelhőrészletek keletkeznek, amelyek már részletesen leírják a környezet bizonyos objektumait, például boltívek kereszteződését. A SLAM kulcsa pedig abban rejlik, hogy az algoritmus képes felismerni ezeket a jól azonosítható egyedi objektumokat, éleket, formákat, geometriákat, ha már egyszer találkozott velük. Ebből adódóan egy bizonyos térrészen való többszöri keresztülhaladás során azonosítani tudja a Backpack pozícióját és orientációját. Következésképpen minél több hurkot, oda-vissza irányú szakaszt tartalmaz a beltéri felmérés, annál jobban képes a rendszer kisimítani az IMU driftjéből származó hibákat: kvázi a helyére teszi az elcsavarodott nyomvonalat.
Természetes illesztő pontok felhasználásával a három technika együtteséből eredő pontosság még tovább javítható.
Hogy mindezt számértékekkel is jellemezzük, azt mondhatjuk, hogy a Backpacktől számított 50 méteres sugarú gömbön belül elérhető relatív pontosság 2-3 cm (kültéren és beltéren egyaránt), az abszolút pontosság kültéren (GNSS jelekkel) 5cm, abszolút beltéri pontosság pedig 10 perc séta esetén 5 cm és 50 cm közé tehető a kondícióktól függően (hurokzárások, oda-vissza útvonal, jellemző geometriák, stb…). Az átlagosan keletkezett adatmennyiség egy perces séta alatt körülbelül 1Gb.
A projekt másik érdekessége volt a Velence csatornáin cirkáló csónakra felszerelt Pegasus Two rendszer. A vízi platform kézenfekvő megoldás egy olyan helyen, ahol megszokott aszfaltutak helyett az utcákat kanálisok alkotják.


Ez a mobiltérképező rendszer relatív értelemben szubmilliméteres pontossággal gyűjti a pontfelhőadatokat, abszolút értelemben pedig 1,5 – 2 cm-es 3D pontossággal rendelkezik.
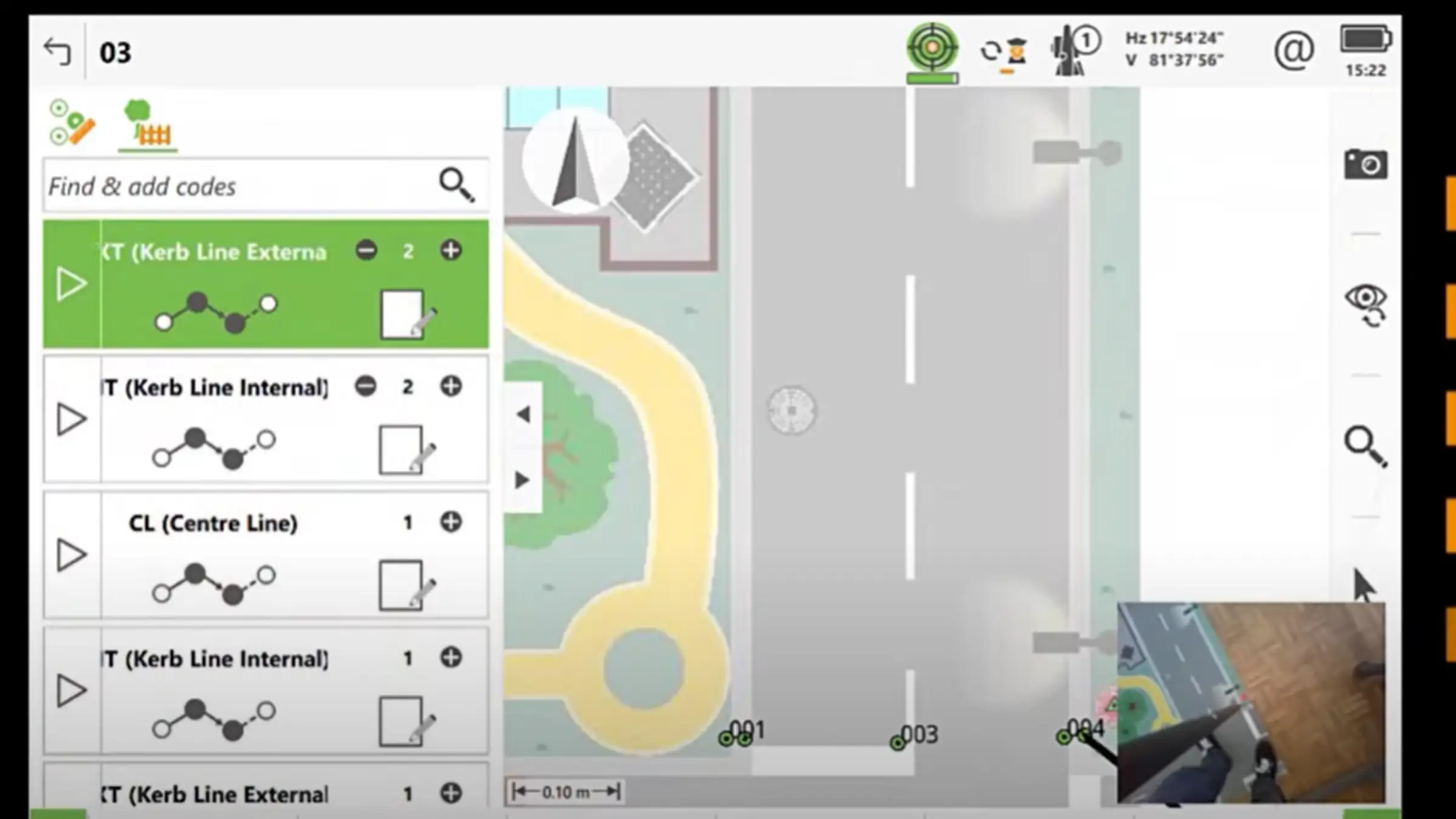
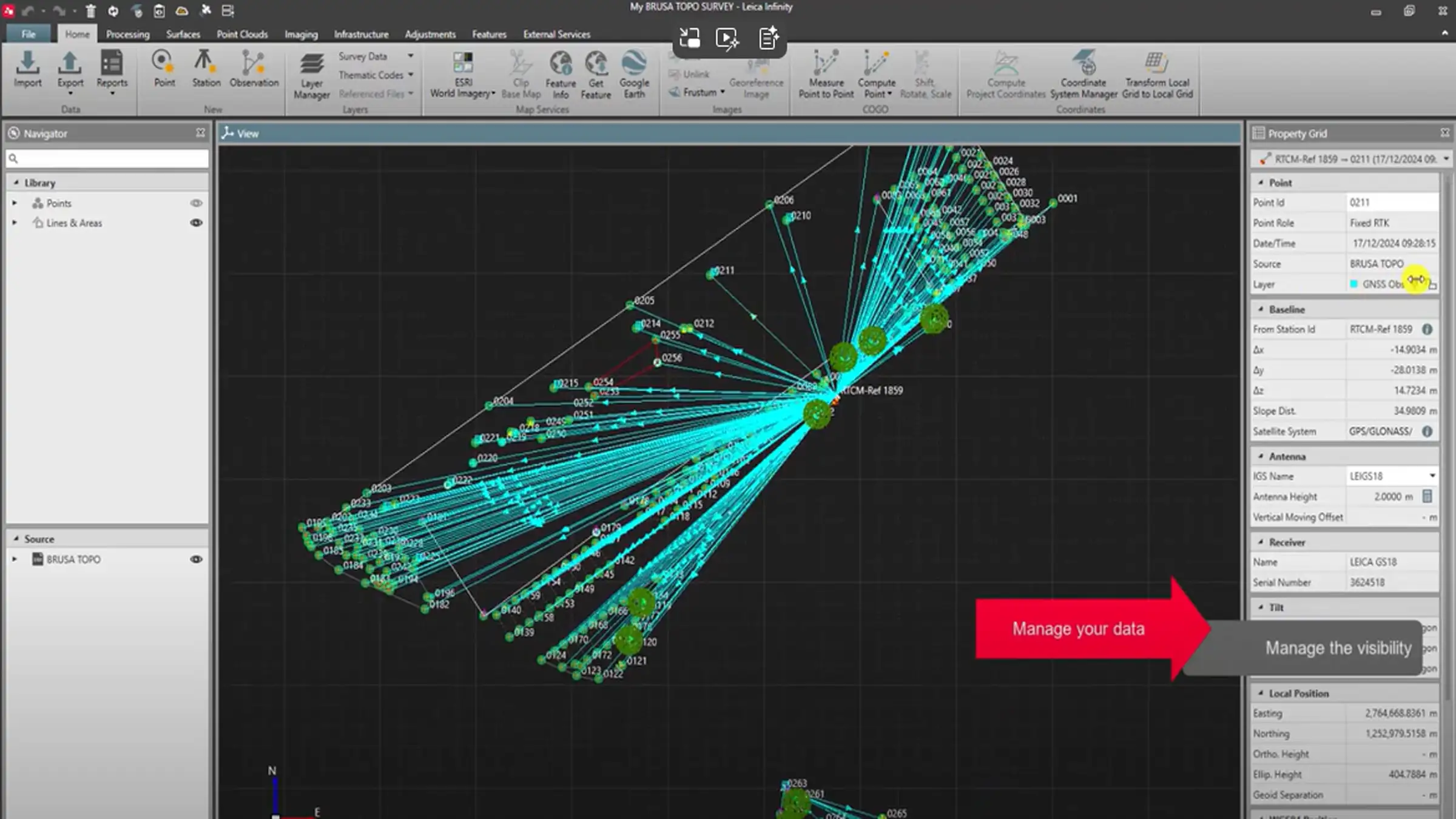
A feldolgozó szoftver teljes mértékben azonos a Backpack adatok feldolgozásához szükséges programokkal, néhány funkciót leszámítva. A mérnöki tervezésekhez, nyilvántartási célú adatbázisok létrehozásához hasznos információ kinyerésére és a 3D pontfelhő kiértékelésére több automatizált funkcióval is el van látva a szoftvercsomag, amely ArcGIS és AutoCAD alapokon fut. Ilyen például a közlekedési jelzőtáblák vagy szabványos szerelvények, műtárgyak felismerése geometriai jellemzőik alapján.
A dokumentumfilm-sorozat eddig leadott részei megtekinthetők a BBC csatorna hivatalos honlapján:http://www.bbc.co.uk/programmes/b0881gfb
A következő részben Firenzébe látogathatunk, a premiert február 1-jén vetíti a BBC One, közép-európai idő szerint 22:00 órakor. Ízelítő a műsorból:
Tarts velünk továbbra is, blogunk következő részeiből megtudhatod, miként használják a mobil térképező rendszereket hazánkban, és hogy hogyan történik a mérési adatok feldolgozása!
Üdvözlettel,
Leica Geosystems
magyarországi csapata

You must be logged in to post a comment.