A nagypontosságú GNSS technológiák fejlődése
A technológiai fejlődés nem kerülte el a GNSS világát sem, sőt, éppen a geodéziai pontosságú GNSS technológiában ment végbe talán a legnagyobb változás az elmúlt évtizedekben. Ebben a cikkben azt mutatjuk be, hogy miként jutottunk el a kezdeti, több órás terepi mérést, majd utókiértékelést igénylő technológiától a valós idejű PPP megoldásig, amellyel bármikor, bárhol a világon, egyetlen vevővel is képesek vagyunk (RTK korrekciók nélkül) centiméteres pontosságú pozícióval dolgozni.
Az 1990-es évek eleje óta a geodéziai pontosságú GPS/GNSS mérésre több technológia alakult ki, s ezek további fejlődése várható. A technológiák megújulását leginkább az ún. GNSS infrastruktúra fejlődése váltotta ki. GNSS infrastruktúra alatt a GNSS alaprendszereket (GPS, Glonass, Galileo, Beidou) kiegészítő rendszereket értjük, amelyek a helymeghatározás pontosságát, integritását, rendelkezésre állását javító szolgálatok, szolgáltatások. E szolgáltatások mindegyikének hátterét a térbeli koordináta-rendszerben ismert koordinátájú földi pontok hálózata jelenti.
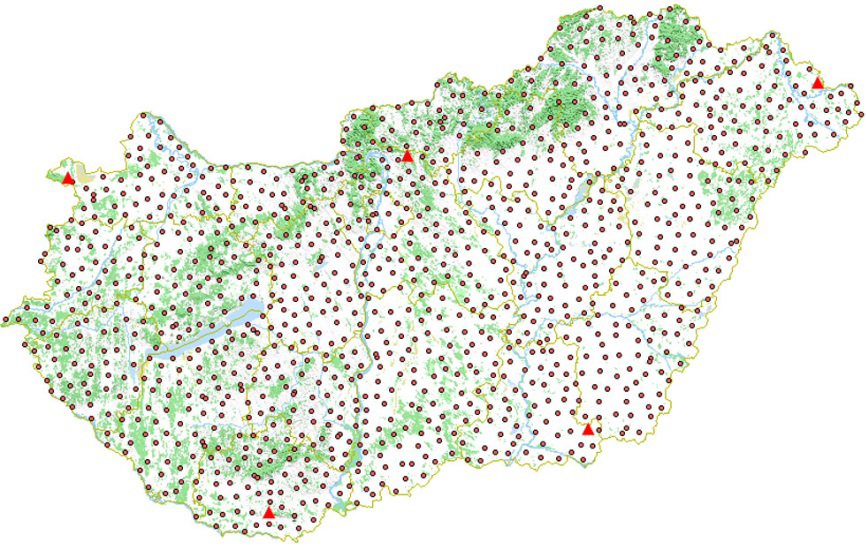
Az OGPSH 1153 pontja, kiemelten az öt EUREF pont
(forrás: http://www.tankonyvtar.hu/)
A GNSS infrastruktúra első (kezdetleges) szintjének tekinthetők azok a földi pontok, amelyek koordinátáit a térbeli koordináta-rendszerben (nevezzük ezt most WGS84-nek) egyszer meghatározzák, majd a továbbiakban a relatív helymeghatározáshoz viszonyító pontként, ún. referenciapontként szolgálnak. Magyarországon az Országos GPS Hálózatot (OGPSH) többek között ilyen célra hozták létre. Az OGPSH a 90-es évek szinte egyedüli GPS mérési technológiáját, az ún. gyors statikus mérést volt hivatott kiszolgálni.


Statikus méréssel, utófeldolgozással meghatározott 5 új pont;
balra saját bázisvevővel, jobbra permanens állomáshoz viszonyítva
(forrás: http://www.tankonyvtar.hu/)
Itt érdemes emlékezni arra, hogy a legkorábbi, geodéziai célú mérések statikus technológiával történtek, ami azt jelentette, hogy egy 10 km-es vektor végpontjain legalább 1 órát kellett mérni szimultán két GPS vevővel, hogy a vektorösszetevők utófeldolgozással számíthatók legyenek. A gyors statikus mérés viszont csak 10-25 perces mérési időt igényelt ugyanekkora bázisvektor meghatározásához, attól függően, hogy vevő kétfrekvenciás vagy egyfrekvenciás volt. Ezt a vektort is utófeldolgozással kellett kiértékelni. Az OGPSH-nak nemcsak referenciapontként volt szerepe, hanem a GPS és EOV között mindenkor szükséges transzformáció közös pontjaiként is.

5 új pont mérése valós időben, saját referenciavevővel, cm-es pontossággal: hagyományos RTK (forrás: http://www.tankonyvtar.hu/)
Lényeges technológiai változást jelentett az RTK megjelenése, amikor valós időben kaptunk cm pontosságú eredményt. Itt két vevőt kellett egyidőben használni, amelyek között a rádióösszeköttetést vagy a mobiltelefonos adatátvitelt is biztosítani kellett. Az ismert ponton telepített referenciavevő összes mérési adatát közel valós időben sugározza a rover felé, ahol a feldolgozás rögtön megtörténik, így nemcsak a felmérés, hanem a GPS-es kitűzés is lehetővé válik. A módszert ma hagyományos RTK-nak nevezzük.
A GNSS infrastruktúra minőségi változását jelentette az ún. a permanens állomás hálózat, vagy referenciaállomás hálózat kiépítése (Amerikában szokásos rövidítése CORS, Continuously Operating Reference Stations). Magyarországon is kiépült az ún. aktív hálózat, amely honlapjának címe után a gnssnet.hu nevet viseli. Ezáltal számos új szolgáltatás és azon alapuló új mérési módszer bevezetése vált lehetővé. Nemcsak a referenciaállomások adatainak letöltése lehetséges utófeldolgozáshoz, hanem fiktív mérési pontokra is generálhatók mesterséges mérési adatok, amit virtuális állomásnak nevezünk. Egyetlen permanens állomás adatainak vektor – kezdőpontként való felhasználása jelenti az egybázisos RTK módszert, amit a mobil internetes adattovábbítás és a GNSS adatok internetre kidolgozott szabványa (NTRIP) tett lehetővé.

A GNSSnet.hu hazai és határon túli referenciaállomásai
(forrás: http://www.gnssnet.hu/)
Az igazi áttörést a hálózati (vagy hálózatos) RTK lehetősége jelenti, amikor nemcsak egyetlen referenciavevő jelenti a viszonyító pontot, hanem a felhasználó környezetében működő több permanens állomás mérési adatát is felhasználjuk a rover helyzetének számításához.

5 új pont mérésének szemléltetése a hálózati RTK VRS koncepciója szerint
(forrás: http://www.tankonyvtar.hu/)
Ilyen, a VRS, MAC, FKP rövidítéssel jelölt hálózatos RTK szolgáltatást vesz igénybe a legtöbb mai felhasználó. A hálózatos RTK szinte kizárólagosan használt technológiává vált a gyakorlatban az elmúlt évtizedben, mert a felhasználó ezzel a módszerrel bárhol az országban cm pontosságú felmérést vagy kitűzést végezhet. A mérés és számítás mindig a GPS térbeli koordináta-rendszerében történik, de köszönhetően a kifejlesztett transzformációs szoftvereknek (például a VITEL-nek), az eredmény automatizáltan átvihető EOV rendszerbe is.

A Leica GPS/GNSS műszereinek fejlődése (a teljesség igénye nélkül)
Szólni kell még a DGPS (Differential Global Positioning System) módszerről, amely eredetileg csak kódmérést használó valós idejű relatív módszer volt, ahol földi rádióadó továbbította a referenciaállomáson mért kódtávolság és az ismert koordinátákból számított műhold-vevő távolság közötti eltéréseket, az ún. kódtávolság-korrekciókat. A differenciális jelző a módszer nevében erre a távolságkülönbségre utal, amit a referenciavevő továbbít a rovernek. Mivel itt csak kódmérést használnak fel, a pontosság eleve korlátozott és függ a bázis hosszától, valamint a földi adó hatótávolsága is korlátozott. A pontosság a gyakorlatban ma méteresre, szubméteresre tehető. Ez a módszer is fejlődött azáltal, hogy nem egyetlen referenciaállomás adatait használják, hanem többét, valamint a korrekciókat a rover helyétől függően sugározzák, nemcsak GPS, hanem Glonass műholdakra vonatkozóan is. Amennyiben a korrekciók sugárzása geostacionárius műholdon keresztül is történik, abban az esetben műholdas alapú kiegészítő GNSS szolgáltatásról beszélünk. Ilyenkor a korrekció-sugárzás nagy földrajzi területre terjed ki, ezért a WADGPS (Wide Area DGPS) rövidítés is használatos. Ilyen, ingyenesen igénybe vehető DGPS szolgáltatást nyújt az amerikai földrészen a WAAS, Európában az uniós finanszírozásból megvalósított EGNOS. Több magáncégnek is van az egész világra kiterjedő DGNSS szolgáltatása.

Az EGNOS referenciaállomásai Európában és a geostacionárius (GEO) holdak besugárzási területe
(forrás: http://www.wikipedia.hu/)

Az EGNOS lényege: GEO műholdról kapott távolság-korrekciók alapján javítjuk pozíciónkat
Az eddig említett módszerek mind relatív eljárások. Azonban nemcsak a relatív eljárások változtak, hanem az abszolút helymeghatározás módszere is fejlődött azáltal, hogy nemcsak a fedélzeti pályaadatok állnak rendelkezésre, hanem ún. precíz pályaadatok is (vagyis a kerethibák egyre kisebbek); az órahibákat és a légköri hibákat is egyre jobban tudják modellezni; továbbá nemcsak kódmérést, hanem fázismérést is felhasználnak. A ciklustöbbértelműség egész számként való feloldása ennél az eljárásnál is elérhető.
A GNSS mérést terhelő hibák modellezésével, hatásuk minimálisra csökkentésével vagy kiküszöbölésével, a matematikai modellek finomításával kialakult az ún. precíz abszolút helymeghatározási módszer (PPP: Precise Point Positioning), amely kezdetben csak utófeldolgozással volt lehetséges, mára pedig valós időben is elérhető. A PPP módszerek pontossága jelentősen javult és a szub-deciméteres, de akár a centiméteres tartományba is eshet. A pontosság azonban erősen függ a mérés időtartamától.
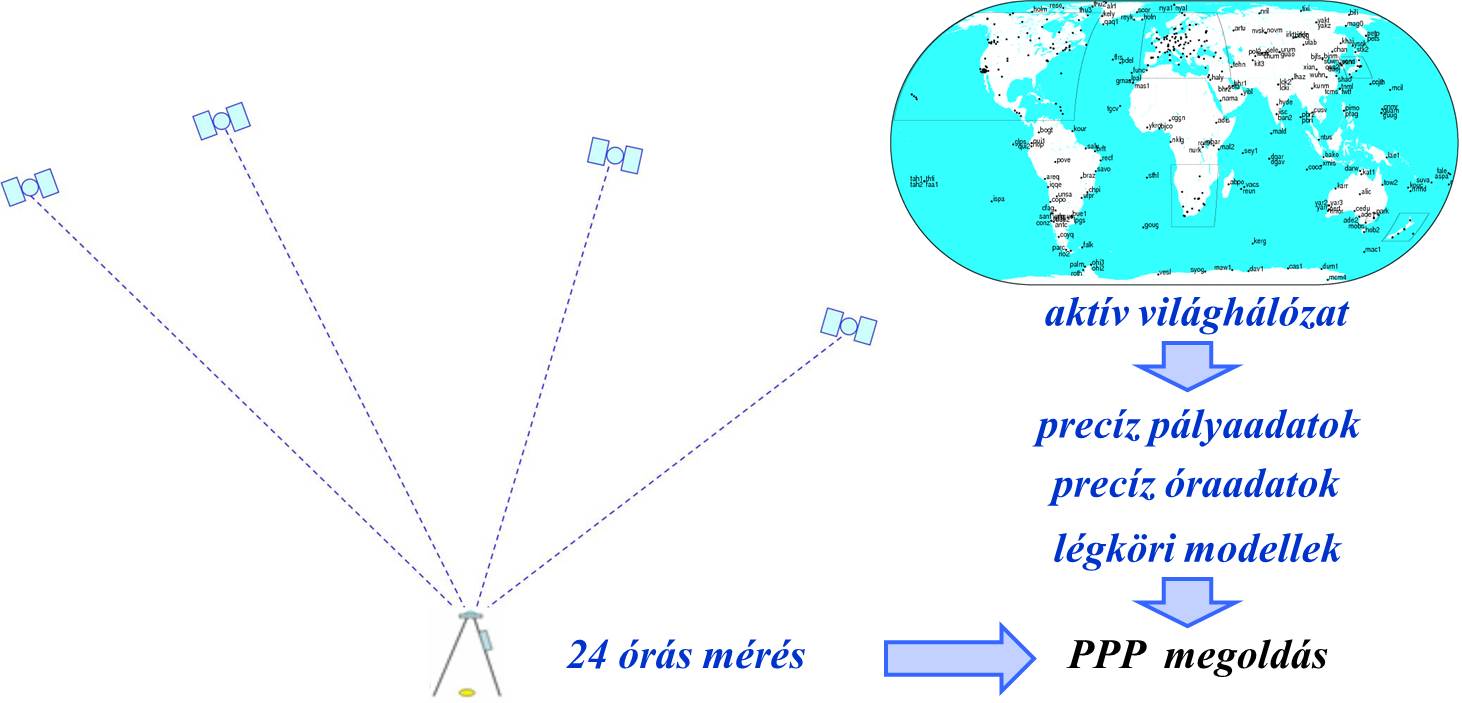
Az utófeldolgozásos PPP módszer alkalmazását egy világhálózat és a GNSS hibák modellezése teszi lehetővé
Az utófeldolgozásos PPP technikát alkalmazva – tesztadatok szerint – 10 cm alatti vízszintes középhiba eléréséhez legalább egyórás mérés szükséges, 4 cm-es középhiba eléréséhez pedig legalább 2 órás időtartamú mérés. 1 cm-nél jobb pontossági mérőszámokat legalább 12 órás, de inkább 24 órás mérésből lehet elérni.
Megjelent a valós idejű PPP is; ilyen például a Leica SmartLink szolgáltatása, amelyről egy következő bejegyzésben lesz szó. SmartLink használatával, kb. 30 percnyi észleléssel – a terepi viszonyok függvényében – akár ± 3 centiméteres pontosság is elérhető 2D-ben.
A PPP technológia használata esetén tisztában kell lennünk azzal, hogy milyen vonatkoztatási rendszerben is dolgozunk/dolgozhatunk. A vonatkoztatási rendszerek útvesztőjéről szól a következő rész, majd egy konkrét tesztmérés eredményeit is megosztjuk veletek. Tartsatok velünk legközelebb is!
Üdvözlettel,
Leica Geosystems
magyarországi csapata

You must be logged in to post a comment.