We have been witnessing a great improvement curve in satellite positioning in the last decades. The increasing number of satellites, shrinking hardware, smarter software and affordable prices have resulted in GNSS technology with RTK precision becoming a crucial, if not the most important tool in a surveyor’s toolbox. The time might not be far when all these are going to be part of the toolbox of everyone, similarly to the Google Earth app. In this situation, both users and developers ask the question: what innovation might lead to a new competitive advantage? The increasingly sensitive antennas, the extra channels, more refined algorithms and more efficient applications all help, naturally, but if we think along the lines of a fundamental, real “think outside of the box” type of innovation that evolves from GNSS technology, then we have to return to the starting point, and question the basic limitations of satellite positioning with RTK precision. We have to ask what those shortcomings are that weren’t solved by the abovementioned developments, but would be revolutionary in the use of satellite positioning if they were. Let’s see the list:
- The most obvious limitation seems to be that of sky visibility. In city areas surrounded by high-rises, in wooded areas, or in places with significant terrain (for example in deep canyons, quarries), the system’s performance will be limited. Inside buildings and underground, the system cannot be used at all.
- In these obstructed outdoor environments, the problem is not only the visibility of satellites but also that of the presence of multipath (whereby reflected signals can reduce positioning performance).
- The necessity of too many subsystems: as it is known, in order to have a position using GNSS with RTK precision we need a satellite constellation, a network system providing terrestrial correction signals (or at least an own base station), and a mobile communication service provider. The subsystems listed are independent of each other, and they are also independent of the user; therefore the user actually depends on four different players, if we include the suppliers of the user (receiver) segment in the circle as well.
Based on all these dependencies, a new real innovation of satellite positioning must ensure the following:
- Coordinates that are precise down to inches/centimeters are available for the user even within buildings or underground.
- The system keeps working properly in urban environments and within buildings, both are typical high multipath environments.
- The number of dependent subsystems decreases to a minimum, and are directly controlled by the user. So the customer should not only have control over the rover side but basically, own and manage the satellite and ground reference network sites as well.
It sounds futuristic and therefore unattainable? Well it is not, this solution already exists, and has been used in engineering operations for some time. As we have reported in our earlier notes, even Leica Geosystems itself offers applications (SmartLink, SmartLink Fill) which can be used instead of the RTK network or the mobile network service providers, but these do not fully cover all the demands listed above yet. To have it all covered, we need the revolutionary new development coming out of Locata Corporation (www.locata.com). We will briefly introduce it in this post, and in our subsequent posts, we will discuss it in more detail.
Locata’s technology (LocataTech) is based on the widely applied radio-frequency (RF) positioning technique, specifically the TOA (Time of Arrival) approach. This method has been used before, but it proved to be too imprecise. To achieve the required positioning accuracy, a serious cost was involved to ensure sufficiently accurate time synchronization. In order to have accurate distance measurements (which is the basis of RF positioning), accuracy both in measuring and synchronization of the clocks within the transmitters is absolutely vital. This problem, before Locata’s invention of a new wireless synchronization technology, has been handled by using extremely expensive atomic clocks and/or complex hardware. The unique advantage of LocataTech lies in the fact that time synchronization can be achieved using its patented TimeLoc solution, by the use of a compact device (or more precisely, a network consisting of such devices) around the size of the typical GNSS receiver (Figure 1):
- The transceiver, the so-called LocataLite, sends signals very similar to those transmitted by a GNSS satellite, and it provides the accurate distance measurements.
- The independent receiver, the so-called Rover, receives the signals transmitted by the LocataLites, and as with typical GNSS receivers, it outputs position data as latitudes, longitudes, and altitude.
 1. Figure : A LocataLite G4 transceiver and a Locata RV8 rover
1. Figure : A LocataLite G4 transceiver and a Locata RV8 rover
A LocataNet is a network of LocataLite transceivers providing a ground positioning system independent of GNSS. It can be used independently or together with GNSS as its terrestrial augmentation. Thanks to the simplified hardware architecture that achieves TimeLoc, the elements of a LocataNet can be a direct substitute for the satellites, the RTK reference receivers, and the mobile communication service that a typical GNSS surveyor is familiar with. Thanks to the characteristics of the TimeLoc signals, it can be used both for indoor and outdoor positioning. The size and coverage of the LocataNet network can be freely modified, to satisfy the customer’s demands. One of the most important requirements of RF positioning is the correct time synchronization. A LocataNet is scalable to cover just a small area such as a warehouse or construction site, a small city area or cover a larger regional area or even large areas of a country – all the time affording RTK-GNSS level performance. To sum up, Locata is a positioning system where the satellite segment, the terrestrial RTK network, and the mobile service provider are all under the control of the user. The user can, according to their needs and the task at hand, scale the network’s coverage (obviously this depends on the number of network hardware), and, if necessary, provide RTK-level positioning even in locations that are not open to the sky.
It is important to note that while the Locata system can be a substitute for GNSS in obstructed and indoor environments, it can also operate as an augmentation to GNSS, as was done in the case of the world’s first GNSS + Locata receiver (Figure 2). This dual functionality provides a smooth transition of the two positioning methods – the user can utilize either the terrestrial Locata signals alone, or the GNSS signals alone, or combine both Locata and GNSS signals together. Using this combined Locata and GNSS solution, the “traditional” GNSS measurements can be augmented with LocataNet signals to cover areas and environments which literally seemed impossible before: this is why Locata calls this solution “GPS 2.0”. The first GNSS+Locata solution in the world was developed by Leica Geosystems, and is called JPS (Jigsaw Positioning System, and is typically deployed for open-pit mining applications (we will discuss this in more detail in a later post).
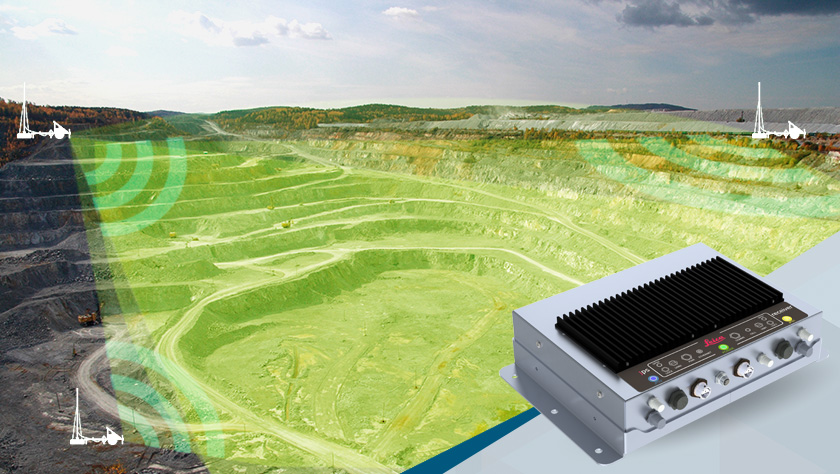 2.Figure: the first integrated GNSS + Locata receiver: Leica JPS (http://hexagonmining.com/products/all-products/jps)
2.Figure: the first integrated GNSS + Locata receiver: Leica JPS (http://hexagonmining.com/products/all-products/jps)
…To be continued soon!
Literature:
-Locata Technology Brief v8.0. (Public – July 2014)
-Press release, Leica Geosystems Mining, Brisbane, Australia, 16 September 2011
Best regards,
Leica Geosystems Hungary

You must be logged in to post a comment.