In the previous post, we have introduced the challenges impacting network RTK GNSS surveying applications:
- Coordinates that are precise down to inches/centimeters are available for the user even within buildings or sites with limited sky visibility.
- The system keeps working properly in urban environments and within buildings, both are typical high multipath environments.
- The number of dependent subsystems decreases to a minimum, and are directly controlled by the user. So the customer should not only have control over the rover side but basically own and manage the satellite and ground reference network sides as well.
One of the potential development directions to solve at least partly the challenges was invented by Locata Corporation and then commercialized for the mining sector by Leica Geosystems. In this post we will briefly discuss the technical background of the innovation.
Time and frequency synchronization – the TimeLoc solution
A basic requirement of accurate RF positioning is the synchronization of the clocks within those receivers and transmitters using electromagnetic waves. This is the base of the principle on which GNSS operates where conventional code measurements can yield a Single Point Position. Also, it plays a role in differential code/phase measuring known as Relative or Differential Positioning, which involves synchronizing satellite clocks in the GPS time frame (this method essentially eliminates any possible clock errors within the receivers). In order to achieve this, subsystems are needed that provide additional information (i.e. RTK base station network, mobile communications, etc. as mentioned in the challenges listed above). In case of the “traditional” RF positioning methods, expensive atomic clocks and/or supporting infrastructure (differential corrections) are needed to achieve accurate 3D positions at the rovers. How can all of these clocks be synchronized without having to use expensive and complex subsystems and methods? Locata Corporation’s patented TimeLoc methodology provides the solution.
TimeLoc makes it possible for the LocataLite transceivers to achieve time synchronization to a precision of better than 1 nanosecond (ns), and around 1 part per billion (ppb) of frequency stability. The base principle of the method is that the transceiver (LocataLite) installed at a known location receives a so-called reference positioning signal from at least one reference transmitter. The reference signal can be generated by either another LocataLite (also installed at a known base location), a WAAS or GNSS satellite, a pseudolite, or any combination of these. After receiving the signal, the transceiver synchronizes its own internal signal generator to the transmitter and also forwards the synchronized signal to all other transceivers (LocataLites) in its vicinity. In turn, all these transceivers also synchronize their clock (and the frequency) to the previous transmitter. Within the LocataNet network so created (its minimum configuration consists of at least two transceivers synchronized to a transmitter considered as reference), the Locata rover is able to determine an RTK-quality 3D position based on code and phase measurements, without the need for differential corrections. It is important to highlight that this method does not require the oscillator reference transmitter to possess frequency stability equivalent to that of expensive atomic clocks, as the TimeLoc synchronization method follows precisely the frequency variations within cheaper clocks and thus maintains an exceptional stability across the network.
Let’s see the details of the method. The base configuration is shown on Figure 1. There is a transmitter at a reference point with known coordinates (202), and a transceiver (201), also with known coordinates, and the latter (201) comprises a receiver (204) and a transmitter (205). The reference positioning signal (203) carries phase, frequency, PRN (pseudo-random noise) code and other “navigational” information. In response to receiving the reference signal (203), the transceiver (201) transmits a slave signal (206) and this signal is also received by its own receiver (204). This slave signal (206) also includes phase, frequency, PRN (pseudo-random noise) code and other “navigational” information. So the receiver (204) receives both the reference signal (203) and its own slave signal (206), and by comparing them, it determines the following:
- the frequency difference of the signals received and generated
- by utilizing navigational data, the rough transmission time
- the pseudo distance differences by comparing PRN codes
- the phase difference of the signals received and generated
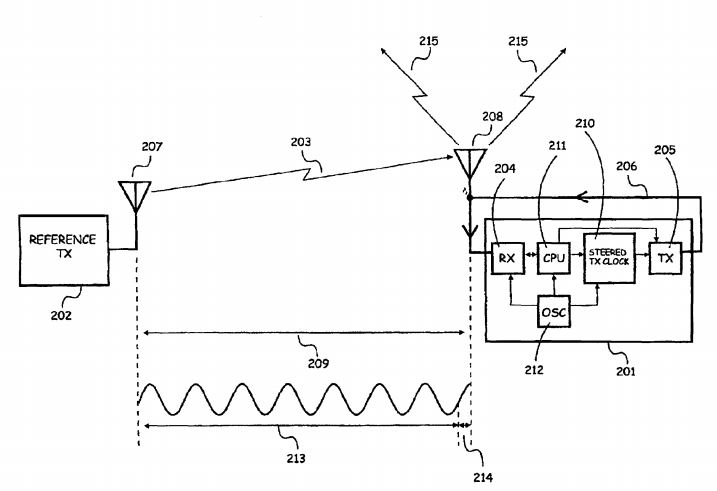
1.Figure Source: United States Patent: Method and Device for Chronologically Synchronizing a Location Network, Patent No. US,7,616,682, B2, Patent date: 10, 2009
Based on these, and also on the exact distance calculated from the known coordinates, the time and frequency synchronization can be carried out. The process is as follows (Figure 2):
- Transceiver “A” (LocataLite) sends its unique signal (code and phase)
- Transceiver “B” (LocataLite) receives the signal from “A”
- Transceiver “B” (LocataLite) generates and transmits its own unique signal (code and phase) and – this is important – it also receives the signal from its own transmitter
- Transceiver “B” (LocataLite) calculates the difference of the signal coming from “A” transceiver and the signal it generated itself (see above)
- Transceiver “B” switches its oscillator to make the difference between the signals (received and generated) null. The differences in the signals are continuously and rapidly monitored and equalized by the system. In other words, transceiver “B” (LocataLite) continuously follows transceiver “A” (LocataLite).
- As a last step, the distance differences are also corrected by the system, based on the known coordinates. As soon as it is done, a so-called TimeLoc state is achieved.


2.Figure Source: Edward Powers, Arnold Colina: Wide Area Network Synchronization Using Locata, United States Naval Observatory, Washington DC.
Scalable cover, the entire system managed by the user
The TimeLoc method makes it possible to have network synchronization better than 1 nanosecond (ns) without the use of expensive atomic clocks, satellites, and infrastructure to provide differential measurements. It, therefore, yields more accurate, so-called single point positioning (meaning to avoid using the „classic” positioning we are familiar with at GNSS). As a result, the user can basically manage the “terrestrial satellites” and reference network specifically for their own needs. The user decides on the constellation and area covered (Figure 3). Should larger or global coverage be required, the Locata network can also easily incorporate measurements from the GNSS satellites, as practically demonstrated in those open-pit mines around the world using the Leica JPS systems.
 3.Figure Source: Locata technology Brief v8.0. (Public – July 2014) – LOCATALITE TRANSCEIVERS and GNNS SATELLITES
3.Figure Source: Locata technology Brief v8.0. (Public – July 2014) – LOCATALITE TRANSCEIVERS and GNNS SATELLITES
The area covered can be a room in a building or a warehouse, but also a part of a city, mine or port, or an entire geographical region. The US Air Force have tested the Locata network successfully over an area of 6,500 km2 first in 2012 (Figure 4), and it is now in full-time operation across a vast area of the famous White Sands Missile Range in New Mexico, USA.
 4.Figure: The first installed LocataNet network, US Air Force, White Sands Missile Range, New Mexico, Source: Locata technology Brief v8.0. (Public – July 2014) – MASTER LOCATA LITE INSTALLED ON MOUNTAIN PEAK
4.Figure: The first installed LocataNet network, US Air Force, White Sands Missile Range, New Mexico, Source: Locata technology Brief v8.0. (Public – July 2014) – MASTER LOCATA LITE INSTALLED ON MOUNTAIN PEAK
RTK accuracy indoors and on sites with limited sky visibility
The signals available in conventional GNSS satellite positioning are very weak, due to the physics affecting the signals coming from satellites orbiting at over 20 km altitude. They are too weak to be of precise use on sites with limited sky visibility or inside buildings. On the other hand, the terrestrial signals used and transmitted by Locata are much stronger. Basically, the signal strength is limited only by local regulations (in current deployments, Locata uses the 2.4GHz range with 200 to 500 mW capacity, just like WiFi does). However, this does not create a problem, as the frequency bands and broadcasting energy utilized can be chosen and modified freely. Thanks to both this and the patented synchronization method introduced above, the Locata signals are capable of providing high accuracy positioning in varied environments with high multi-pathing load and inside buildings.
No wonder the first adopters interested in evaluating and now implementing Locata’s technology were the US Air Force and Leica Geosystems. Even NASA has begun to use Locata networks in their research for next-generation air traffic control systems for Unmanned Aerial Vehicles (UAVs).
To sum up, Locata’s invention has proved itself to be a viable, accurate and reliable to radio frequency (RF)-based distance measurement technology. In many applications, it can be a complement to GNSS when there are restricted or blocked satellite visibility. In some difficult signal environments, it can even be used independently of GNSS. There is ongoing development to reduce the SWAP (size weight and power) requirements of the Locata technology in order to satisfy the demands of new market segments. In the next post, we will discuss the first commercial application resulting from the cooperation between Leica Geosystems and Locata Corporation which is already used in mining production systems: the Leica JPS (Jigsaw Positioning System).
Hereby we would like to express our special thanks to Locata CEO Nunzio Gambale (nunzio.gambale@locatacorp.com) and Dr. Ryan Keenan (ryan.keenan@locata.com) for their support to brief this engineering curiosity.
Literature:
- Chris Rizos (2013): Locata: A positioning system for indoor and outdoor applications where GNSS does not work, Proceedings of the 18th Association of Public Authority Surveyors Conference, Australia, Australian Capital Territory, Australia, 12-14 March 2013
- Edwards Powers, Arnold Colina (2015): Wide Area Wireless Network Synchronization Using Locata, United States Naval Observatory, Washington DC, published in GPS World, http://digital.gpsworld.com/October2015, October 2015.
- Joseph P. Gauthier, Eamonn P. Glennon, Chris C. Rizos, Andrew G. Dempster (2013): Time Transfer Performance of Locata – Initial results, US Institute of Navigation’s Precise Time & Time Interval Conference, Seattle – December 2-5, 2013
- Locata – A new constellation (2011): GPS World, September 2011
- Locata Technology Brief v8.0 (Public – July 2014)
- Method and device for chronologically synchronizing a location network, United States Patent, November 10, 2009
Best regards,
Leica Geosystems Hungary

You must be logged in to post a comment.